
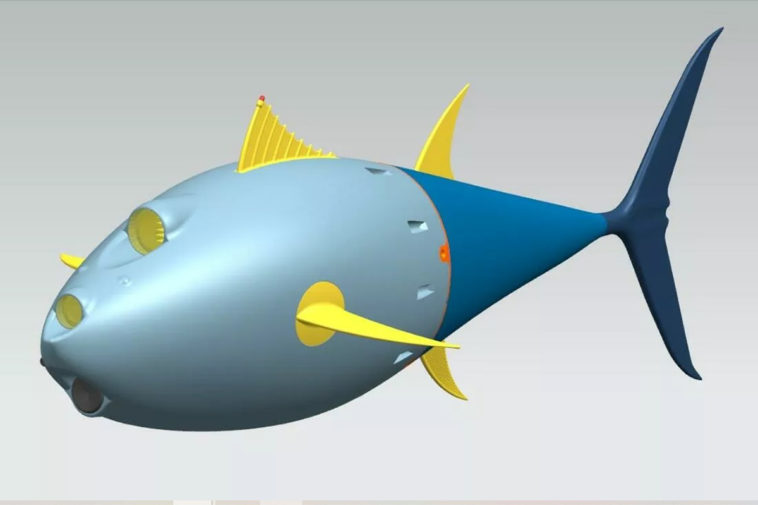
Сотрудники Центра нейротехнологий и машинного обучения Балтийского федерального университета (БФУ) им. И. Канта создали ходовой макет первого подводного биоморфного робота-тунца, который сможет управлять косяками рыб и направлять их движение. Коротко о том, как будет работать эта машина и для чего она нужна — в материале «МБХ медиа».
Участвующие в проекте биологии, математики, физики и инженеры работают над созданием биоморфного робота-тунца, который сможет самостоятельно воспроизводить движения, навигацию и взаимодействие в другими рыбами так, как это происходит в природе. Как сообщает агентство «РИА Новости» со ссылкой на ведущего научного сотрудника Центра нейротехнологий и машинного обучения Виктора Казанцева, это первая подобная разработка в России. Однако ученый уверен, что именно за такими технологиями стоит будущее.
По словам специалиста, чтобы реализовать поставленную задачу, ученым нужно проработать каждую деталь, от способа передвижения в воде до искусственного интеллекта, который будет принимать решения. Робот-тунец должен уметь действовать самостоятельно, так как под водой нет системы GPS и он должен ориентироваться в пространстве сам.
«Разработать любой аппаратно-программный комплекс, будь то самокат или самолет, достаточно сложно. В нашем же случае, эта задача уже решена самой природой, в том числе с точки зрения энергопотребления и функционала. Нам нужно всего лишь правильно скопировать алгоритм — создать цифровой двойник живого организма. Но насколько трудоемко создавать абсолютные копии, не зная исходного кода! Например, мы знаем, что рыба плывет так, а не иначе, чтобы минимизировать потерю своей энергии. Но как она пользуется при этом ресурсами своего организма? Вот, что нам предстоит узнать», — рассказал журналистам Казанцев.
Специалист также пояснил, что у проекта есть две основные цели. Во-первых, расширить фундаментальные знания и подробно изучить технику передвижения живых организмов, а также понять принципы оптимизации энергопотребления и системы принятия решений. Во-вторых, научиться с помощью робота управлять биоресурсами, вести экологический мониторинг, а также искать и сопровождать заданные под водой объекты. В качестве примера второго типа применения Казанцев описал условия экологической катастрофы, например, разлив нефти.
«В таком случае робот способен в качестве лидера или условного хищника увести косяк рыб в безопасное место. Недавно одна канадская компания стала активно использовать птицеподобных роботов в аэропорту, чтобы отпугивать настоящих пернатых подальше от взлетной полосы. Востребованность таких устройств очевидна», — заключил он.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.